
Design of a variable stiffness actuator based on a multi-pulley system with a spring
Author affiliations
DOI:
https://doi.org/10.15625/0866-7136/21024Keywords:
variable stiffness, spring design, pulleys, nonlinear torque, actuator designAbstract
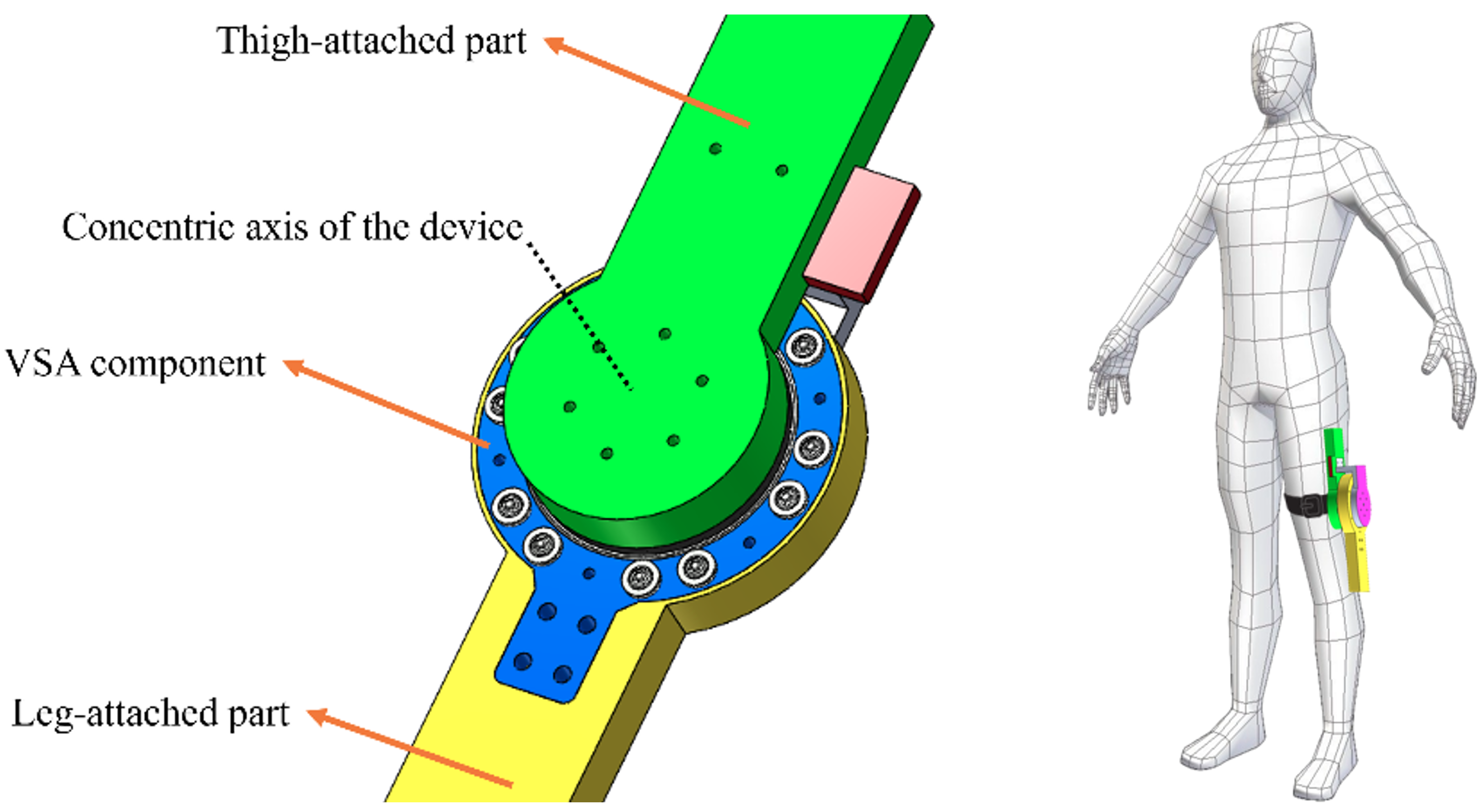
This paper presents a variable stiffness actuator (VSA) based on a multi-pulley system with a linear spring. In this design, twelve pairs of outer pulleys and six pairs of inner pulleys are evenly arranged around a center and are serially connected to a spring through a cable. When the inner pulleys rotate about the center point, the spring is extended to generate an elastic force exerted on the cable and then transmitted to the output link as an output torque, resulting in an output stiffness. The significance of the proposed design is that it can quickly vary the output stiffness by adjusting the positions of the inner pulleys using a cam disk. Also, all the components are adequately arranged, making the design compact. In this work, the design concept, analysis, and a numerical example are provided to illustrate the proposed VSA and its performance. It is shown that the VSA can offer a maximum output torque of 30 N-cm with a maximum deflection of 40 degrees. These parameters can demonstrate the wide application and high adaptability of the proposed actuator to various environments.
Downloads
References
[1] Y. Zhu, Q. Wu, B. Chen, D. Xu, and Z. Shao. Design and evaluation of a novel torque-controllable variable stiffness actuator with reconfigurability. IEEE/ASME Transactions on Mechatronics, 27, (2022), pp. 292–303. https://doi.org/10.1109/tmech.2021.3063374.
[2] L. Fang and Y. Wang. Stiffness analysis of a variable stiffness joint using a leaf spring. In Lecture Notes in Computer Science, Springer International Publishing, (2017), pp. 225–237. https://doi.org/10.1007/978-3-319-65292-4 20.
[3] Y. Liu, S. Cui, and Y. Sun. Mechanical design and analysis of a novel variable stiffness actuator with symmetrical pivot adjustment. Frontiers of Mechanical Engineering, 16, (2021), pp. 711–725. https://doi.org/10.1007/s11465-021-0647-1.
[4] T. Bacek, M. Moltedo, C. Rodriguez-Guerrero, J. Geeroms, B. Vanderborght, and D. Lefeber. Design and evaluation of a torque-controllable knee joint actuator with adjustable series compliance and parallel elasticity. Mechanism and Machine Theory, 130, (2018), pp. 71–85. https://doi.org/10.1016/j.mechmachtheory.2018.08.014.
[5] C. Wang, B. Sheng, Z. Li, M. Sivan, Z.-Q. Zhang, G.-Q. Li, and S. Q. Xie. A lightweight series elastic actuator with variable stiffness: Design, modeling, and evaluation. IEEE/ASME Transactions on Mechatronics, 28, (2023), pp. 3110–3119. https://doi.org/10.1109/tmech.2023.3254813.
[6] Y. Xu, K. Guo, J. Sun, and J. Li. Design, modeling and control of a reconfigurable variable stiffness actuator. Mechanical Systems and Signal Processing, 160, (2021). https://doi.org/10.1016/j.ymssp.2021.107883.
[7] Y. Lu, Y. Yang, Y. Xue, J. Jiang, Q. Zhang, and H. Yue. A variable stiffness actuator based on leaf springs: Design, model and analysis. Actuators, 11, (2022). https://doi.org/10.3390/act11100282.
[8] D. J. Braun, V. Chalvet, T.-H. Chong, S. S. Apte, and N. Hogan. Variable stiffness spring actuators for low-energy-cost human augmentation. IEEE Transactions on Robotics, 35, (2019), pp. 1435–1449. https://doi.org/10.1109/tro.2019.2929686.
Downloads
Published
How to Cite
License

This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.






