
Advanced biped gait generator using NARX-MLP neural model optimized by enhanced evolutionary algorithm
Author affiliations
DOI:
https://doi.org/10.15625/0866-7136/17230Keywords:
small-sized biped, walking pattern generator (WPG), Nonlinear Auto-Regressive eXogenous (NARX) model, model, Enhanced Differential Evolution (EDE) optimization technique, zero-moment-point (ZMP) conceptAbstract
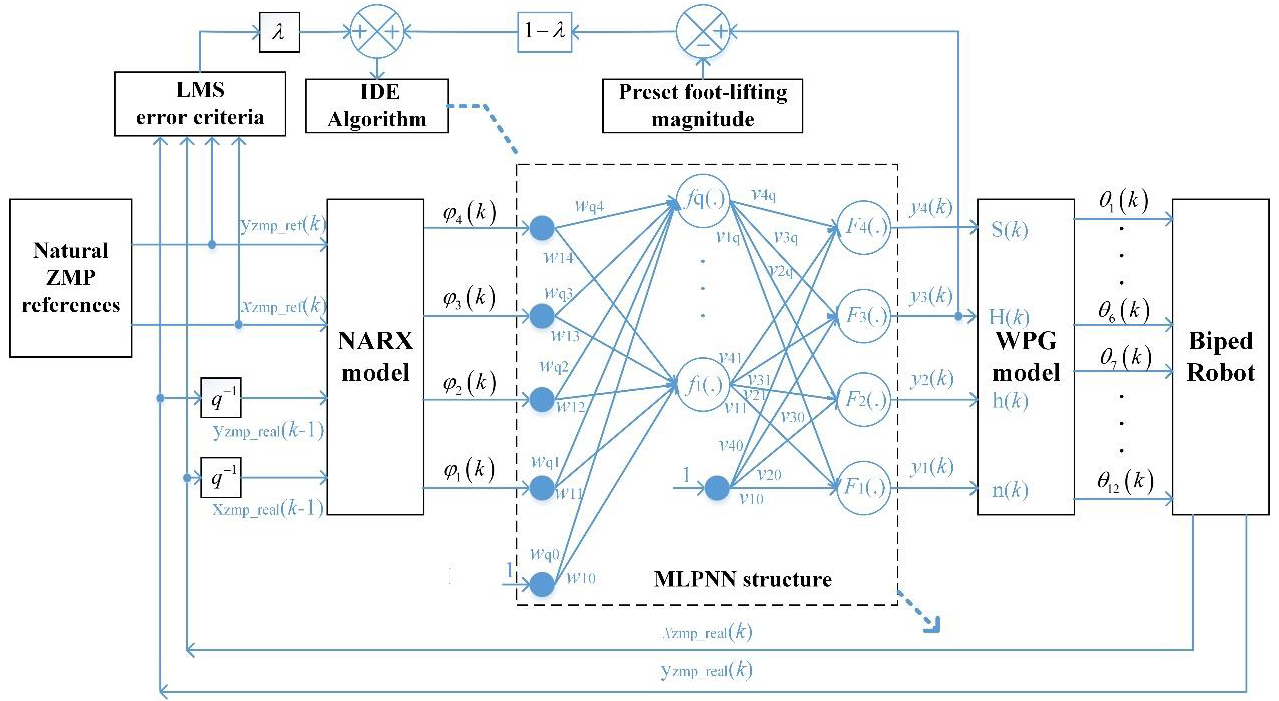
A novel biped walking pattern combining robust zero-moment-point ZMP technique and pre-determined foot-lifting value is proposed in this paper. The implementation of suggested approach contains following stages. Initially, a one-step ZMP curve for a small-sized humanoid is created using the 3rd-order interpolating equation, with pre-determined velocity responding the ZMP concept. The next step, biped gait planning is modeled as a non-linear MIMO plant including ten degree-of-freedom DOF. Then, the installation of a biped walking pattern generator (WPG) based on the new hybrid Neural-NARX model is completed. Eventually, the novel Enhanced Differential Evolution (EDE) technique is applied to optimally identify the weights of the hybrid Neural-NARX structure, for ensuring robust robot walking in terms of desired ZMP trajectories and pre-determined foot-lifting value. All case studies confirm that it is surely provide a biped WPG satisfying both of the effectiveness and high robustness. The verification of the newly proposed WPG is adequately tested via both simulation and experiment results.
Downloads
References
C. Chevallereau, G. Bessonnet, G. Abba, and Y. Aoustin. Bipedal robots: Modeling, design and walking synthesis. Wiley, (2008).
M. Vukobratovic and B. Borovac. Zero-moment point - Thirty five years of its life. International Journal of Humanoid Robotics, 01, (2004), pp. 157–173.
E. Ohashi, T. Sato, and K. Ohnishi. A walking stabilization method based on environmental modes on each foot for biped robot. IEEE Transactions on Industrial Electronics, 56, (2009), pp. 3964–3974.
J. Yi, Q. Zhu, R. Xiong, and J. Wu. Walking algorithm of humanoid robot on uneven terrain with terrain estimation. International Journal of Advanced Robotic Systems, 13, (2016).
C. Liu, J. Ning, and Q. Chen. Dynamic walking control of humanoid robots combining linear inverted pendulum mode with parameter optimization. International Journal of Advanced Robotic Systems, 15, (2018).
S. Liu and P. Liu. Benchmarking and optimization of robot motion planning with motion planning pipeline. The International Journal of Advanced Manufacturing Technology, 118, (2021), pp. 949–961.
Y. Meng, S. Kuppannagari, and V. Prasanna. Accelerating proximal policy optimization on CPU-FPGA heterogeneous platforms. In Proceeding of IEEE 28th Annual International Symposium on Field-Programmable Custom Computing Machines (FCCM), Piscataway, IEEE, (2020), pp. 19–27.
T. T. Huan, C. V. Kien, H. P. H. Anh, and N. T. Nam. Adaptive gait generation for humanoid robot using evolutionary neural model optimized with modified differential evolution technique. Neurocomputing, 320, (2018), pp. 112–120.
V.-H. Dau, C.-M. Chew, and A.-N. Poo. Optimal trajectory generation for bipedal robots. In Proceeding of 7th IEEE-RAS International Conference on Humanoid Robots, Pittsburgh, PA, USA, IEEE, (2007), pp. 603–608.
S. Wang, W. Chaovalitwongse, and R. Babuska. Machine learning algorithms in bipedal robot control. IEEE Transactions on Systems, Man, and Cybernetics, Part C (Applications and Reviews), 42, (2012), pp. 728–743.
S. Phaniteja, P. Dewangan, P. Guhan, A. Sarkar, and K. M. Krishna. A deep reinforcement learning approach for dynamically stable inverse kinematics of humanoid robots. In Proceeding of IEEE International Conference on Robotics and Biomimetics (ROBIO), IEEE, (2017).
N. Navarro-Guerrero, C. Weber, P. Schroeter, and S. Wermter. Real-world reinforcement learning for autonomous humanoid robot docking. Robotics and Autonomous Systems, 60, (2012), pp. 1400–1407.
K.-S. Hwang, W.-C. Jiang, Y.-J. Chen, and H. Shi. Motion segmentation and balancing for a biped robot's imitation learning. IEEE Transactions on Industrial Informatics, 13, (2017), pp. 1099–1108.
H. Kim, D. Seo, and D. Kim. Push recovery control for humanoid robot using reinforcement learning. In Proceeding of 2019 Third IEEE International Conference on Robotic Computing (IRC), IEEE, (2019).
C. Gil, H. Calvo, and H. Sossa. Learning an efficient gait cycle of a biped robot based on reinforcement learning and artificial neural networks. Applied Sciences, 9, (2019).
A. Xi and C. Chen. Walking control of a biped robot on static and rotating platforms based on hybrid reinforcement learning. IEEE Access, 8, (2020), pp. 148411–148424.
W. Zhang, Y. Jiang, F. U. D. Farrukh, C. Zhang, D. Zhang, and G. Wang. LORM: a novel reinforcement learning framework for biped gait control. PeerJ Computer Science, 8, (2022).
T. T. Huan and H. P. H. Anh. Comparative stable walking gait optimization for small-sizedbiped robot using meta-heuristic optimization algorithms. Vietnam Journal of Mechanics, 40, (2018), pp. 407–424.
Q. Huang, K. Yokoi, S. Kajita, K. Kaneko, H. Arai, N. Koyachi, and K. Tanie. Planning walking patterns for a biped robot. IEEE Transactions on Robotics and Automation, 17, (2001), pp. 280–289.
G. Dip, V. Prahlad, and P. D. Kien. Genetic algorithm-based optimal bipedal walking gait synthesis considering tradeoff between stability margin and speed. Robotica, 27, (2009), pp. 355–365.
T. T. Thong, T. T. Huan, C. V. Kien, and H. P. H. Anh. An advanced fuzzy control for maximum power point tracking PV system optimized with modified MDE algorithm. In Proceeding of 2021 International Conference on System Science and Engineering (ICSSE), IEEE, (2021).
Downloads
Published
How to Cite
Issue
Section
License

This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.






