
A new optimal control scheme with adjustable gain featured by saturation function and its switching models for non-smooth vibrations
Author affiliations
DOI:
https://doi.org/10.15625/0866-7136/23064Keywords:
switching saturation function, switching optimal control, non-smooth vibration, seat suspension system, severe disturbanceAbstract
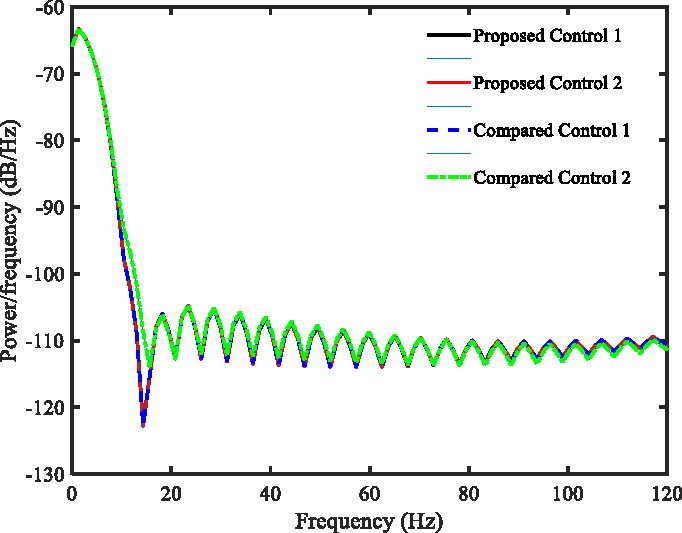
In this study, a new optimal control scheme with two proposed theorems is presented. Two optimal control theorems are developed: (i) the first scheme uses the conventional adaptive gain with a new proposed saturation function, and (ii) the second scheme utilizes a new adaptive switching saturation function based on the first model (i). In the first model, the derivative result is derived in a new form of exponential function of the saturation function. The adaptive gain for this model includes system states with a chosen matrix of the Hamiltonian equation. In the second model, a new switching saturation is adopted. The constraints related to the system states and the chosen matrix are then applied. Unlike the first control scheme, the second scheme uses the required boundary of the system state for choosing the adaptive gain. The properties of the saturation function used in the first model are still applied in the second model. The main advantage of this second model is to provide flexibility in computing the gain under severe disturbance through the initial boundaries and adjusting the energy consumption of the control system. After the formulation, the proposed controllers with the new adaptive gains are applied to a vehicle seat suspension system with non-smooth vibrations. Two existing controllers are also chosen for this simulation to compare with the proposed models. The simulation results show that the proposed control schemes can provide better control performances in terms of the PSD index (power spectral density), displacement, and control input signal.
Downloads
References
Basin, M., Loukianov, A. G., & Hernández-Fabián, R. (2011). An optimal sliding mode-like regulator for nonlinear polynomial systems. International Journal of Systems Science, 42(11), 1909–1916. https://doi.org/10.1080/00207721.2010.545491
Basin, M., Rodriguez-Ramirez, P., Ferrara, A., & Calderon-Alvarez, D. (2012). Sliding mode optimal control for linear systems. Journal of the Franklin Institute, 349(4), 1350–1363. https://doi.org/10.1016/j.jfranklin.2011.05.010
Deng, L., & Shen, J. (2021). Hurwicz model of uncertain linear quadratic optimal control with jump. International Journal of Control, 94(6), 1455–1460. https://doi.org/10.1080/00207179.2019.1652768
Karg, P., Kopf, F., Braun, C. A., & Hohmann, S. (2023). Excitation for adaptive optimal control of nonlinear systems in differential games. IEEE Transactions on Automatic Control, 68(1), 596–603. https://doi.org/10.1109/TAC.2022.3145651
Kikuuwe, R., Yamamoto, Y., & Brogliato, B. (2022). Implicit implementation of nonsmooth controllers to nonsmooth actuators. IEEE Transactions on Automatic Control, 67(9), 4645–4657. https://doi.org/10.1109/TAC.2022.3163124
Li, Y., Liu, Y., & Tong, S. (2022). Observer-based neuro-adaptive optimized control of strict-feedback nonlinear systems with state constraints. IEEE Transactions on Neural Networks and Learning Systems, 33(7), 3131–3145. https://doi.org/10.1109/TNNLS.2021.3051030
Li, Y., Wang, T., Liu, W., & Tong, S. (2022). Neural network adaptive output-feedback optimal control for active suspension systems. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 52(6), 4021–4032. https://doi.org/10.1109/TSMC.2021.3089768
Liu, M., Wan, Y., Lewis, F. L., & Lopez, V. G. (2020). Adaptive optimal control for stochastic multiplayer differential games using on-policy and off-policy reinforcement learning. IEEE Transactions on Neural Networks and Learning Systems, 31(12), 5522–5533. https://doi.org/10.1109/TNNLS.2020.2969215
Liu, P., Hu, Q., Li, L., Liu, M., Chen, X., Piao, C., & Liu, X. (2022). Fast control parameterization optimal control with improved Polak–Ribière–Polyak conjugate gradient implementation for industrial dynamic processes. ISA Transactions, 123, 188–199. https://doi.org/10.1016/j.isatra.2021.05.020
Modares, H., Lewis, F. L., & Naghibi-Sistani, M. (2013). Adaptive optimal control of unknown constrained-input systems using policy iteration and neural networks. IEEE Transactions on Neural Networks and Learning Systems, 24(10), 1513–1525. https://doi.org/10.1109/TNNLS.2013.2276571
Phu, D. X., Huy, T. D., Mien, V., & Choi, S. (2018). A new composite adaptive controller featuring the neural network and prescribed sliding surface with application to vibration control. Mechanical Systems and Signal Processing, 107, 409–428. https://doi.org/10.1016/j.ymssp.2018.01.040
Phu, D. X., & Mien, V. (2020). Robust control for vibration control systems with dead-zone band and time delay under severe disturbance using adaptive fuzzy neural network. Journal of the Franklin Institute, 357(17), 12281–12307. https://doi.org/10.1016/j.jfranklin.2020.09.011
Phu, D. X., Mien, V., Thanh Tu, P. H., Nguyen, N. P., & Choi, S. (2020). A new optimal sliding mode controller with adjustable gains based on Bolza-Meyer criterion for vibration control. Journal of Sound and Vibration, 485, 115542. https://doi.org/10.1016/j.jsv.2020.115542
Phu Do, X., Hung Nguyen, Q., & Choi, S. (2019). New hybrid optimal controller applied to a vibration control system subjected to severe disturbances. Mechanical Systems and Signal Processing, 124, 408–423. https://doi.org/10.1016/j.ymssp.2019.01.036
Sai, H., Xu, Z., He, S., Zhang, E., & Zhu, L. (2022). Adaptive nonsingular fixed-time sliding mode control for uncertain robotic manipulators under actuator saturation. ISA Transactions, 123, 46–60. https://doi.org/10.1016/j.isatra.2021.05.011
Soler, M., Kamgarpour, M., Lloret, J., & Lygeros, J. (2016). A hybrid optimal control approach to fuel-efficient aircraft conflict avoidance. IEEE Transactions on Intelligent Transportation Systems, 17(7), 1826–1838. https://doi.org/10.1109/TITS.2015.2510824
Song, R., Lewis, F. L., Wei, Q., & Zhang, H. (2016). Off-policy actor-critic structure for optimal control of unknown systems with disturbances. IEEE Transactions on Cybernetics, 46(5), 1041–1050. https://doi.org/10.1109/TCYB.2015.2421338
Sui, S., Li, Y., & Tong, S. (2016). Observer-based adaptive fuzzy control for switched stochastic nonlinear systems with partial tracking errors constrained. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 46(12), 1605–1617. https://doi.org/10.1109/TSMC.2016.2523904
Tong, S., Sun, K., & Sui, S. (2018). Observer-based adaptive fuzzy decentralized optimal control design for strict-feedback nonlinear large-scale systems. IEEE Transactions on Fuzzy Systems, 26(2), 569–584. https://doi.org/10.1109/TFUZZ.2017.2686373
Vamvoudakis, K. G., Miranda, M. F., & Hespanha, J. P. (2016). Asymptotically stable adaptive–optimal control algorithm with saturating actuators and relaxed persistence of excitation. IEEE Transactions on Neural Networks and Learning Systems, 27(11), 2386–2398. https://doi.org/10.1109/TNNLS.2015.2487972
Xiao, W., Belta, C. A., & Cassandras, C. G. (2022). Sufficient conditions for feasibility of optimal control problems using Control Barrier Functions. Automatica, 135, 109960. https://doi.org/10.1016/j.automatica.2021.109960
Zhang, Y., Li, S., & Liu, X. (2018). Adaptive near-optimal control of uncertain systems with application to underactuated surface vessels. IEEE Transactions on Control Systems Technology, 26(4), 1204–1218. https://doi.org/10.1109/TCST.2017.2705057
Downloads
Published
How to Cite
License

This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.




Funding data
-
Bộ Giáo dục và Ðào tạo
Grant numbers B2024-VGU-02


